
Abstract: 本文介绍CUDA线程束执行的本质的后半部分,包括资源,延迟,同步,扩展性等严重影响性能的线,吞吐量,带宽,占用率,CUDA同步
理解线程束执行的本质(Part II)
最近这几篇应该是CUDA最核心的部分,并不是编程模型,而是执行模型,通过执行模型我们去了解GPU硬件的具体运行方式,这样才能保证我们写出更快更好的程序。
由于访问量太少,转载请保留本条广告,各位老铁欢迎访问Tony的网站:http://www.face2ai.com
资源分配
我们前面提到过,每个SM上执行的基本单位是线程束,也就是说,单指令通过指令调度器广播给某线程束的全部线程,这些线程同一时刻执行同一命令,当然也有分支情况,上一篇我们已经介绍了分支,这是执行的那部分,当然后有很多线程束没执行,那么这些没执行的线程束情况又如何呢?我给他们分成了两类,注意是我分的,不一定官方是不是这么讲。我们离开线程束内的角度(线程束内是观察线程行为,离开线程束我们就能观察线程束的行为了),一类是已经激活的,也就是说这类线程束其实已经在SM上准备就绪了,只是没轮到他执行,这时候他的状态叫做阻塞,还有一类可能分配到SM了,但是还没上到片上,这类我称之为未激活线程束。
而每个SM上有多少个线程束处于激活状态,取决于以下资源:
- 程序计数器
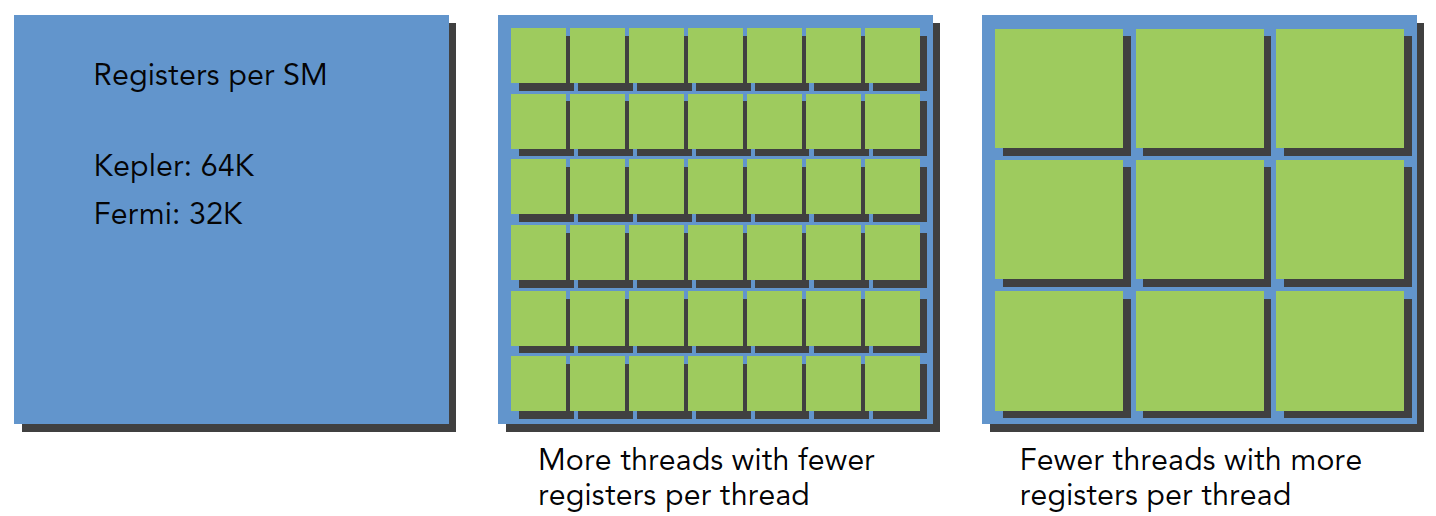
- 寄存器
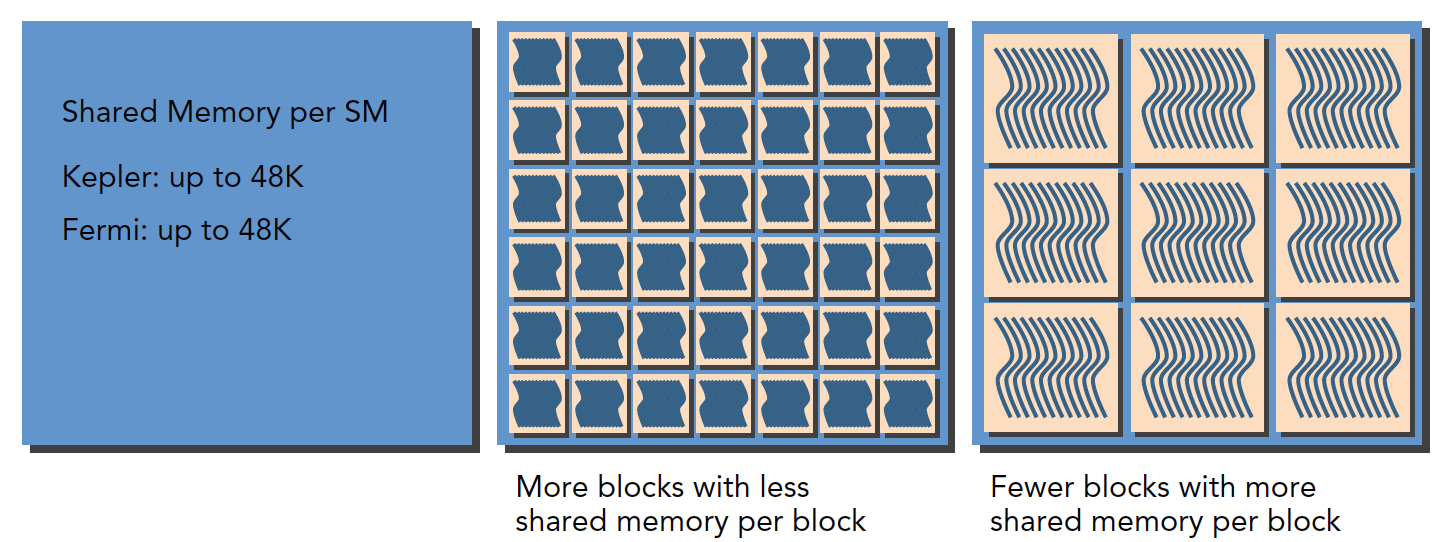
- 共享内存
线程束一旦被激活来到片上,那么他就不会再离开SM直到执行结束。
每个SM都有32位的寄存器组,每个架构寄存器的数量不一样,其存储于寄存器文件中,为每个线程进行分配,同时,固定数量的共享内存,在线程块之间分配。
一个SM上被分配多少个线程块和线程束取决于SM中可用的寄存器和共享内存,以及内核需要的寄存器和共享内存大小。
这是一个平衡问题,就像一个固定大小的坑,能放多少萝卜取决于坑的大小和萝卜的大小,相比于一个大坑,小坑内可能放十个小萝卜,或者两个大萝卜,SM上资源也是,当kernel占用的资源较少,那么更多的线程(这是线程越多线程束也就越多)处于活跃状态,相反则线程越少。
关于寄存器资源的分配:
关于共享内存的分配:
上面讲的主要是线程束,如果从逻辑上来看线程块的话,可用资源的分配也会影响常驻线程块的数量。
特别是当SM内的资源没办法处理一个完整块,那么程序将无法启动,这个是我们应该找找自己的毛病,你得把内核写的多大,或者一个块有多少线程,才能出现这种情况。
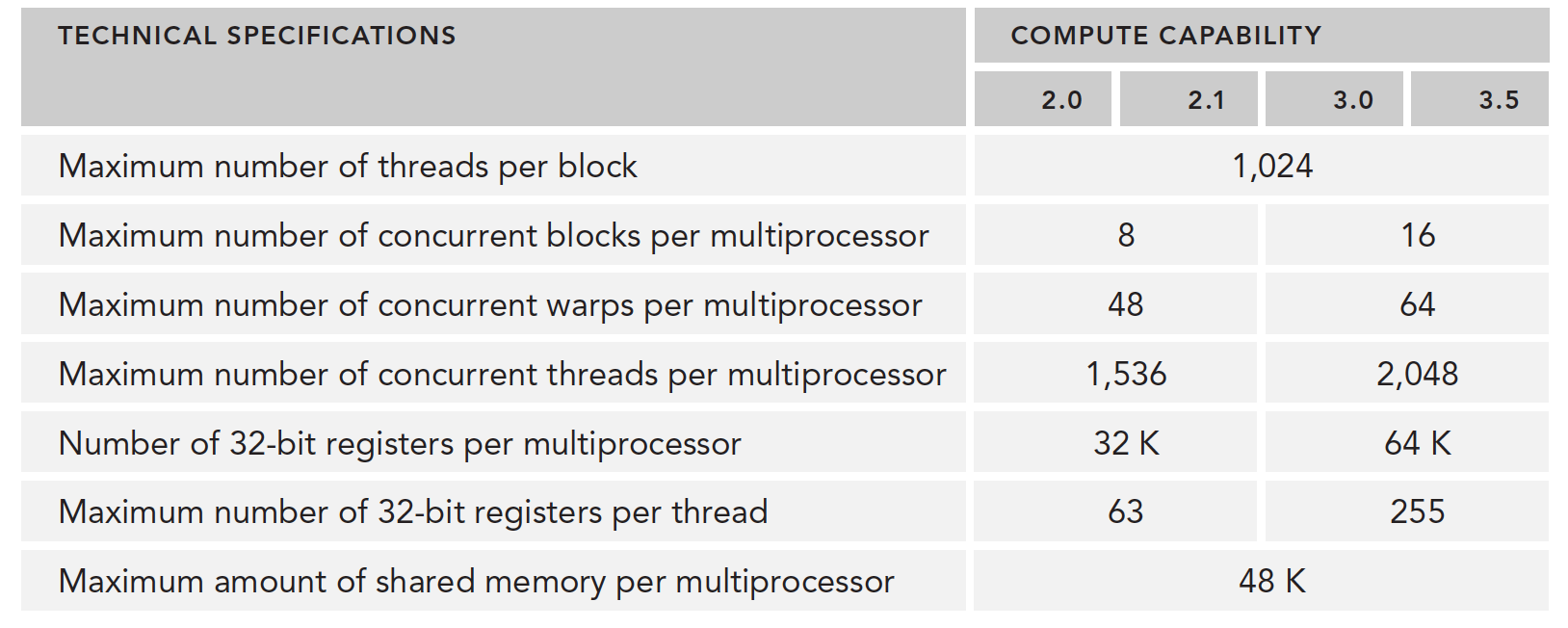
以下是资源列表:
当寄存器和共享内存分配给了线程块,这个线程块处于活跃状态,所包含的线程束称为活跃线程束。
活跃的线程束又分为三类:
- 选定的线程束
- 阻塞的线程束
- 符合条件的线程束
当SM要执行某个线程束的时候,执行的这个线程束叫做选定的线程束,准备要执行的叫符合条件的线程束,如果线程束不符合条件还没准备好就是阻塞的线程束。
满足下面的要求,线程束才算是符合条件的:
- 32个CUDA核心可以用于执行
- 执行所需要的资源全部就位
Kepler活跃的线程束数量从开始到结束不得大于64,可以等于。
任何周期选定的线程束小于等于4。
由于计算资源是在线程束之间分配的,且线程束的整个生命周期都在片上,所以线程束的上下文切换是非常快速的,。
下面我们介绍如何通过大量的活跃的线程束切换来隐藏延迟
延迟隐藏
延迟隐藏,延迟是什么,就是当你让计算机帮你算一个东西的时候计算需要用的时间,举个宏观的例子,比如一个算法验证,你交给计算机,计算机会让某个特定的计算单元完成这个任务,共需要十分钟,而接下来这十分钟,你就要等待,等他算完了你才能计算下一个任务,那么这十分钟计算机的利用率有可能并不是100%,也就是说他的某些功能是空闲的,你就想能不能再跑一个同样的程序不同的数据(做过机器学习的这种情况不会陌生,大家都是同时跑好几个版本)然后你又让计算机跑,这时候你发现还没有完全利用完资源,于是有继续加任务给计算机,结果加到第十分钟了,已经加了十个了,你还没加完,但是第一个任务已经跑完了,如果你这时候停止加任务,等陆陆续续的你后面加的任务都跑完了共用时20分钟,共执行了10个任务,那么平局一个任务用时 $\frac{20}{10}=2$ 分钟/任务 。 但是我们还有一种情况,因为任务还有很多,第十分钟你的第一个任务结束的时候你继续向你的计算机添加任务,那么这个循环将继续进行,那么第二十分钟你停止添加任务,等待第三十分钟所有任务执行完,那么平均每个任务的时间是: $\frac{30}{20}=1.5$ 分钟/任务,如果一直添加下去,$lim_{n\to\infty}\frac{n+10}{n}=1$ 也就是极限速度,一分钟一个,隐藏了9分钟的延迟。
当然上面的另一个重要参数是每十分钟添加了10个任务,如果每十分钟共可以添加100个呢,那么二十分钟就可以执行100个,每个任务耗时: $\frac{20}{100}=0.2$ 分钟/任务 三十分钟就是 $\frac{30}{200}=0.15$ 如果一直添加下去, $lim_{n\to\infty}\frac{n+10}{n\times 10}=0.1$ 分钟/任务 。
这是理想情况,有一个必须考虑的就是虽然你十分钟添加了100个任务,可是没准添加50个计算机就满载了,这样的话 极限速度只能是:$lim_{n\to\infty}\frac{n+10}{n\times 5}=0.2$ 分钟/任务 了。
所以最大化是要最大化硬件,尤其是计算部分的硬件满跑,都不闲着的情况下利用率是最高的,总有人闲着,利用率就会低很多,即最大化功能单元的利用率。利用率与常驻线程束直接相关。
硬件中线程调度器负责调度线程束调度,当每时每刻都有可用的线程束供其调度,这时候可以达到计算资源的完全利用,以此来保证通过其他常驻线程束中发布其他指令的,可以隐藏每个指令的延迟。
与其他类型的编程相比,GPU的延迟隐藏及其重要。对于指令的延迟,通常分为两种:
- 算术指令
- 内存指令
算数指令延迟是一个算术操作从开始,到产生结果之间的时间,这个时间段内只有某些计算单元处于工作状态,而其他逻辑计算单元处于空闲。
内存指令延迟很好理解,当产生内存访问的时候,计算单元要等数据从内存拿到寄存器,这个周期是非常长的。
延迟:
- 算术延迟 10~20 个时钟周期
- 内存延迟 400~800 个时钟周期
下图就是阻塞线程束到可选线程束的过程逻辑图: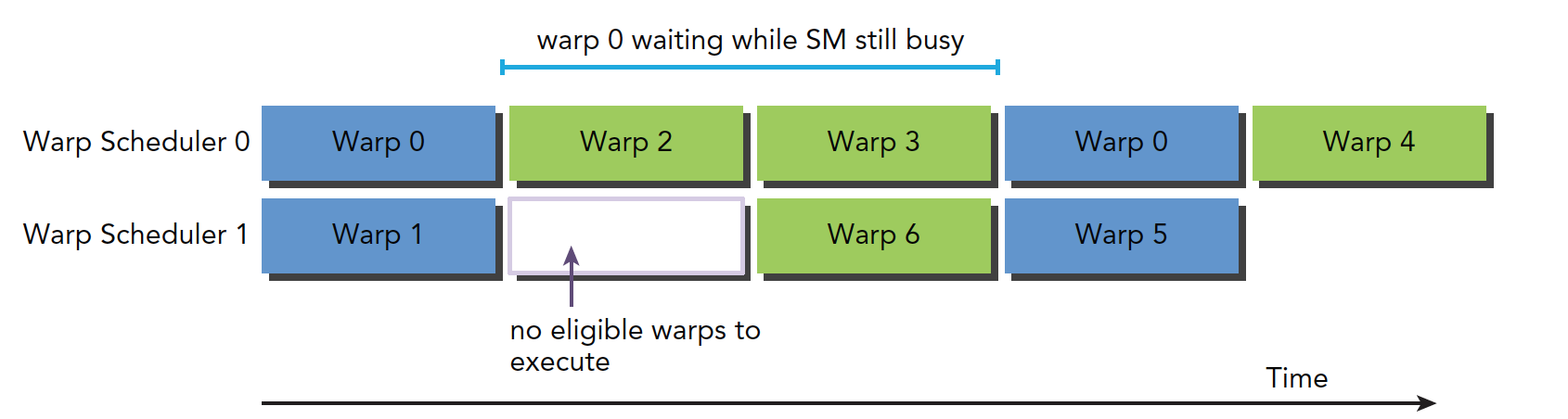
其中线程束0在阻塞两短时间后恢复可选模式,但是在这段等待时间中,SM没有闲置。
那么至少需要多少线程,线程束来保证最小化延迟呢?
little法则给出了下面的计算公式
$$
\text{所需线程束} = \text{延迟} \times \text{吞吐量}
$$
注意带宽和吞吐量的区别,带宽一般指的是理论峰值,最大每个时钟周期能执行多少个指令,吞吐量是指实际操作过程中每分钟处理多少个指令。
这个可以想象成一个瀑布,像这样,绿箭头是线程束,只要线程束足够多,吞吐量是不会降低的: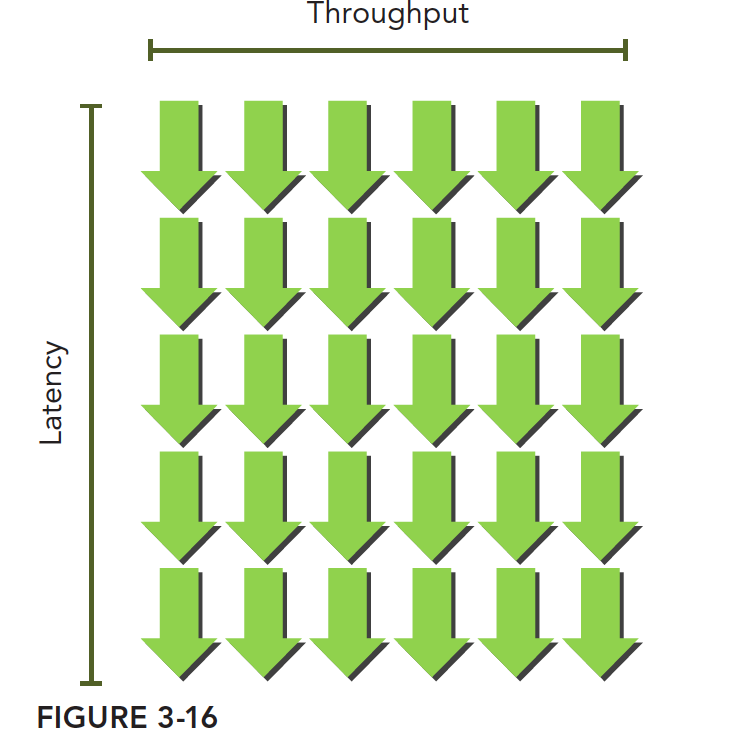
下面表格给出了Fermi 和Kepler执行某个简单计算时需要的并行操作数:
另外有两种方法可以提高并行:
- 指令级并行(ILP): 一个线程中有很多独立的指令
- 线程级并行(TLP): 很多并发地符合条件的线程
同样,与指令周期隐藏延迟类似,内存隐藏延迟是靠内存读取的并发操作来完成的,需要注意的是,指令隐藏的关键目的是使用全部的计算资源,而内存读取的延迟隐藏是为了使用全部的内存带宽,内存延迟的时候,计算资源正在被别的线程束使用,所以我们不考虑内存读取延迟的时候计算资源在做了什么,这两种延迟我们看做两个不同的部门但是遵循相同的道理。
我们的根本目的是把计算资源,内存读取的带宽资源全部使用满,这样就能达到理论的最大效率。
同样下表根据Little 法则给出了需要多少线程束来最小化内存读取延迟,不过这里有个单位换算过程,机器的性能指标内存读取速度给出的是GB/s 的单位,而我们需要的是每个时钟周期读取字节数,所以要用这个速度除以频率,例如C 2070 的内存带宽是144 GB/s 化成时钟周期: $\frac{144GB/s}{1.566GHz}=92 B/t$ ,这样就能得到单位时间周期的内存带宽了。
得出下表的数据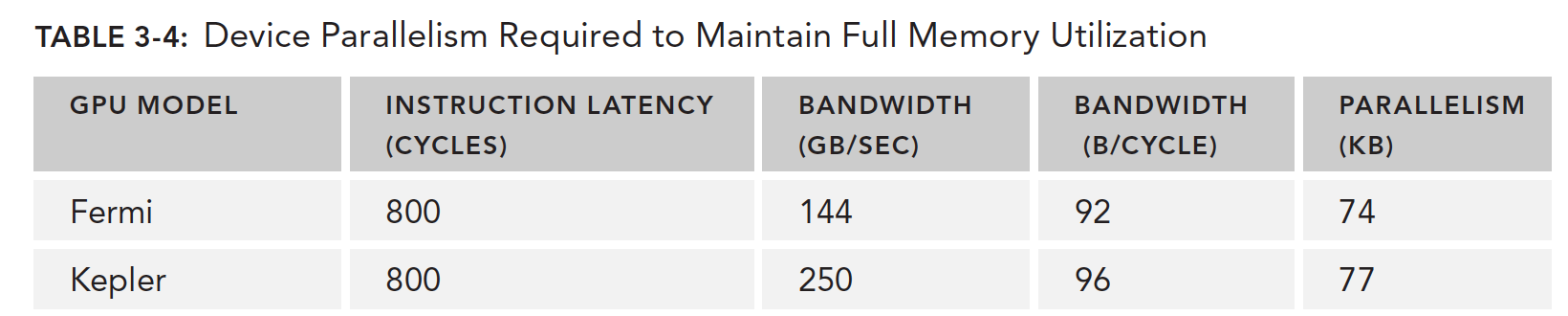
需要说明的是这个速度不是单个SM的而是整个GPU设备的,以内们用的内存带宽是GPU设备的而不是针对一个SM的。
Fermi 需要并行的读取74的数据才能让GPU带宽满载,如果每个线程读取4个字节,我们大约需要18500个线程,大约579个线程束才能达到这个峰值。
所以,延迟的隐藏取决于活动的线程束的数量,数量越多,隐藏的越好,但是线程束的数量又受到上面的说的资源影响。所以这里就需要寻找最优的执行配置来达到最优的延迟隐藏。
那么我们怎么样确定一个线程束的下界呢,使得当高于这个数字时SM的延迟能充分的隐藏,其实这个公式很简单,也很好理解,就是SM的计算核心数乘以单条指令的延迟,
比如32个单精度浮点计算器,每次计算延迟20个时钟周期,那么我需要最少 32x20 =640 个线程使设备处于忙碌状态。
占用率
占用率是一个SM种活跃的线程束的数量,占SM最大支持线程束数量的比,
我们前面写的程序7_deviceInformation 中添加几个成员的查询就可以帮我们找到这个值:
完整代码:https://github.com/Tony-Tan/CUDA_Freshman
1 | // 省略了上半部分 |
结果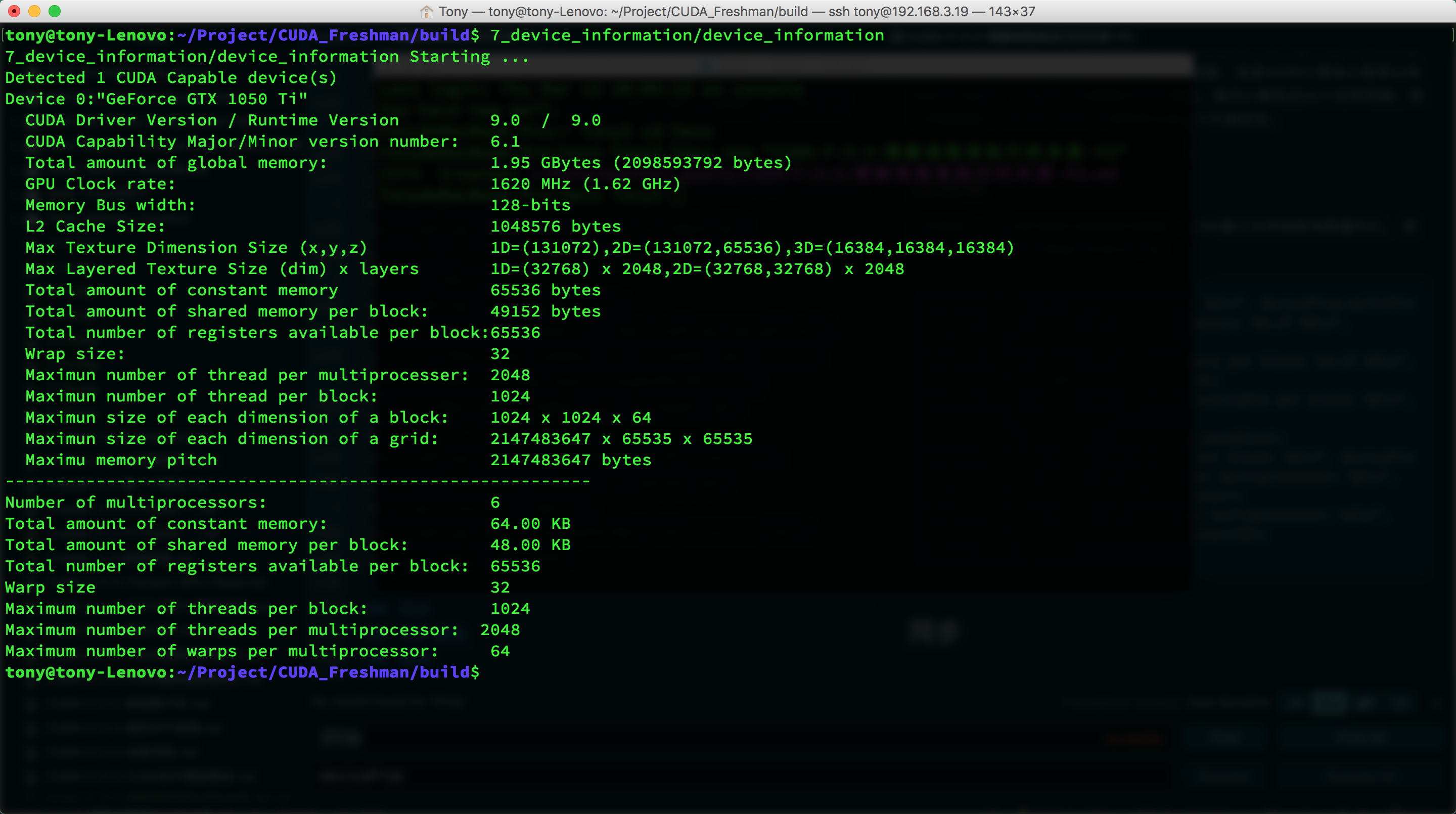
最大64个线程束每个SM。
CUDA工具包中提供一个叫做UCDA占用率计算器的电子表格,填上相关数据可以帮你自动计算网格参数: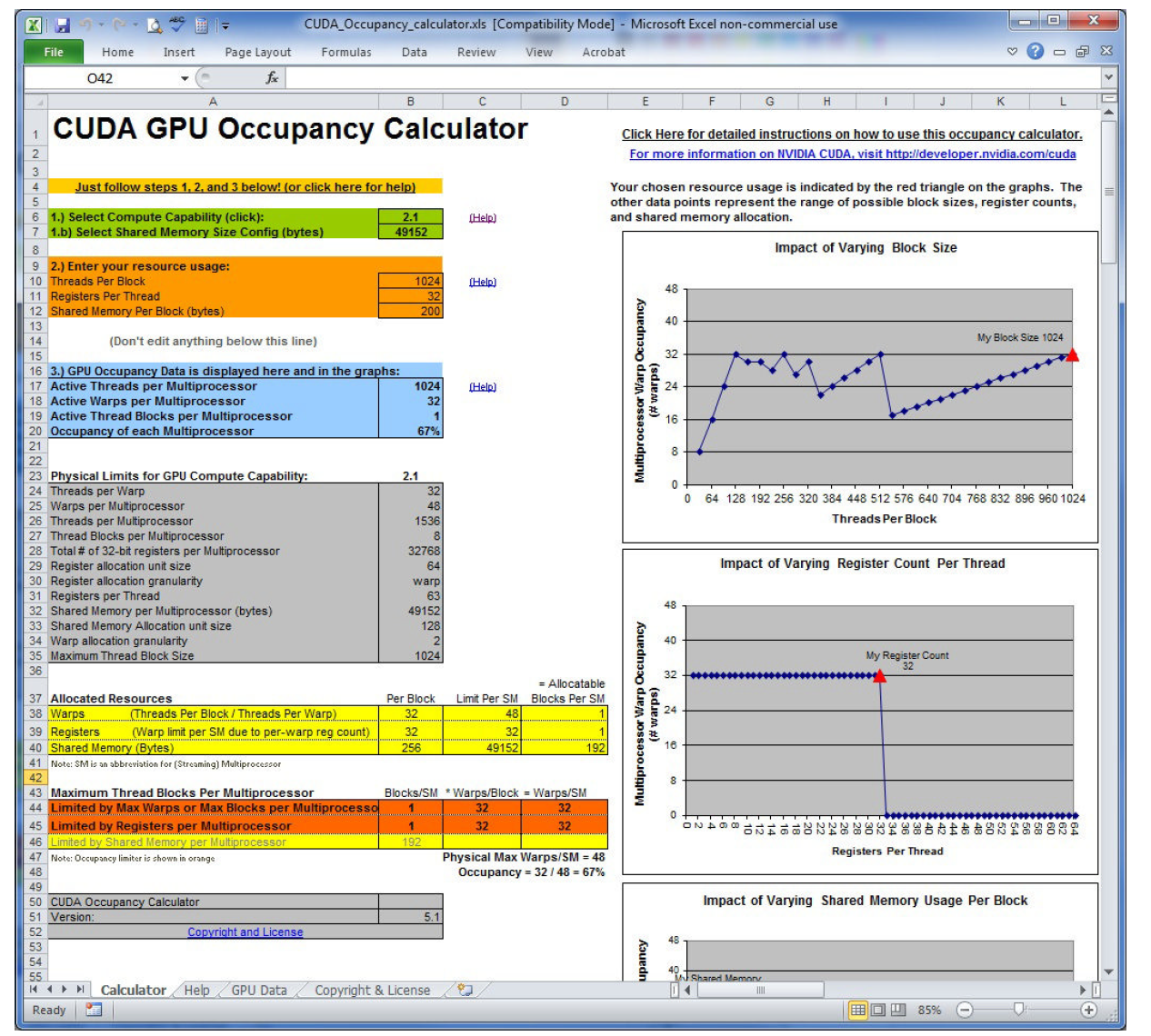
上图是书上的截图,吐个槽,这些人居然写了个表格,为啥不写个程序?
上面我们已经明确内核使用寄存器的数量会影响SM内线程束的数量,nvcc的编译选项也有手动控制寄存器的使用。
也可以通过调整线程块内线程的多少来提高占用率,当然要合理不能太极端:
- 小的线程块:每个线程块中线程太少,会在所有资源没用完就达到了线程束的最大要求
- 大的线程块:每个线程块中太多线程,会导致每个SM中每个线程可用的硬件资源较少。
同步
并发程序对同步非常有用,比如pthread中的锁,openmp中的同步机制,这没做的主要目的是避免内存竞争
CUDA同步这里只讲两种:
- 线程块内同步
- 系统级别
块级别的就是同一个块内的线程会同时停止在某个设定的位置,用1
__syncthread();
这个函数完成,这个函数只能同步同一个块内的线程,不能同步不同块内的线程,想要同步不同块内的线程,就只能让核函数执行完成,控制程序交换主机,这种方式来同步所有线程。
内存竞争是非常危险的,一定要非常小心,这里经常出错。
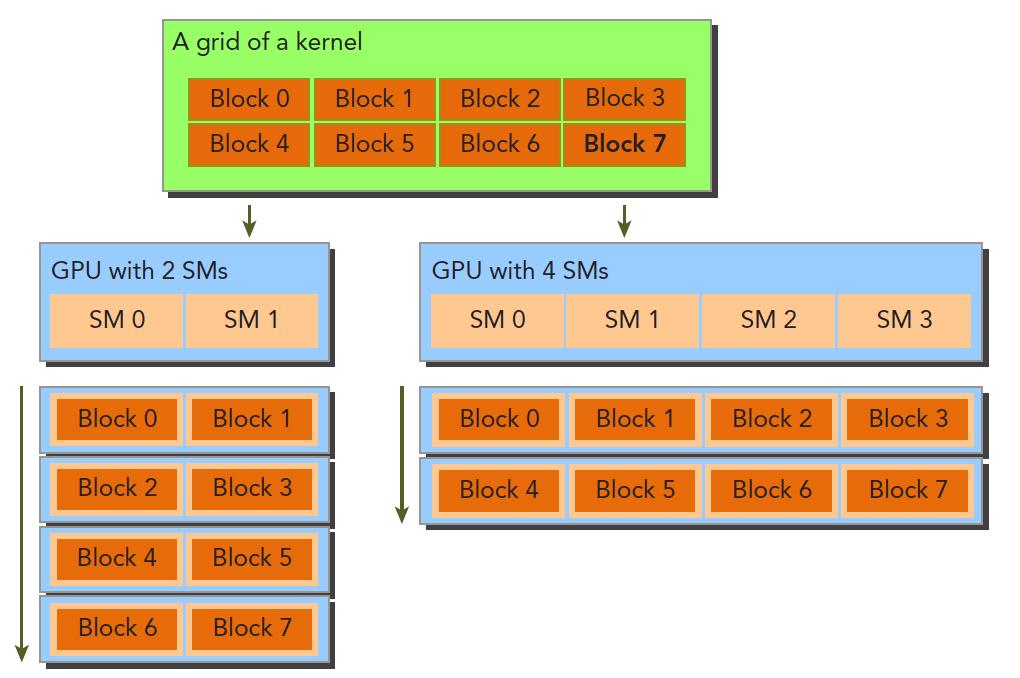
可扩展性
可扩展性其实是相对于不同硬件的,当某个程序在设备1上执行的时候时间消耗是T当我们使用设备2时,其资源是设备1的两倍,我们希望得到T/2的运行速度,这种性质是CUDA驱动部分提供的特性,目前来说 Nvidia正在致力于这方面的优化,如下图:
总结
今天效率很高,主要是这个部分之前已经研究透彻了,第三章是Freshman阶段的最核心部分,需要大家多查资料,多思考,多练习,待续。。。