
Abstract: 本文主要介绍CUDA内存管理,以及CUDA内存模型下的各种内存的特点。
Keywords: CUDA内存管理,CUDA内存分配和释放,CUDA内存传输,固定内存,零拷贝内存,统一虚拟寻址,统一内存寻址
内存管理
迷茫和困惑会影响我们的前进,彻底摆脱也许不太可能,但是我们必须肯定信仰的力量,专注你所热爱的,就会走出迷雾。
CUDA编程的目的是给我们的程序加速,尤其是机器学习,人工智能类的计算,CPU不能高效完成,说白了,我们在控制硬件,控制硬件的语言属于底层语言,比如C语言,最头疼的就是管理内存,python,php这些语言有自己的内存管理机制,c语言的内存管理机制——程序员管理。这样的好处是学起来特别困难,但是学会了又会觉得特别爽,因为自由,你可以随意的控制计算机的计算过程。CUDA是C语言的扩展,内存方面基本集成了C语言的方式,由程序员控制CUDA内存,当然,这些内存的物理设备是在GPU上的,而且与CPU内存分配不同,CPU内存分配完就完事了,GPU还涉及到数据传输,主机和设备之间的传输。
接下来我们要了解的是:
- 分配释放设备内存
- 在主机和设备间传输内存
为达到最优性能,CUDA提供了在主机端准备设备内存的函数,并且显式地向设备传递数据,显式的从设备取回数据。
内存分配和释放
内存的分配和释放我们在前面已经用过很多次了,前面所有的要计算的例子都包含这一步:1
cudaError_t cudaMalloc(void ** devPtr,size_t count)
这个函数用过很多次了,唯一要注意的是第一个参数,是指针的指针,一般的用法是首先我们生命一个指针变量,然后调用这个函数:1
2float * devMem=NULL;
cudaError_t cudaMalloc((float**) devMem, count)
这里是这样的,devMem是一个指针,定义时初始化指向NULL,这样做是安全的,避免出现野指针,cudaMalloc函数要修改devMem的值,所以必须把他的指针传递给函数,如果把devMem当做参数传递,经过函数后,指针的内容还是NULL。
不知道这个解释有没有听明白,通俗的讲,如果一个参数想要在函数中被修改,那么一定要传递他的地址给函数,如果只传递本身,函数是值传递的,不会改变参数的值。
内存分配支持所有的数据类型,什么int,float。。。这些都无所谓,因为他是按照字节分配的,只要是正数字节的变量都能分配,当然我们根本没有半个字节的东西。
函数执行失败返回:cudaErrorMemoryAllocation.
当分配完地址后,可以使用下面函数进行初始化:1
cudaError_t cudaMemset(void * devPtr,int value,size_t count)
用法和Memset类似,但是注意,这些被我们操作的内存对应的物理内存都在GPU上。
当分配的内存不被使用时,使用下面语句释放程序。1
cudaError_t cudaFree(void * devPtr)
注意这个参数一定是前面cudaMalloc类的函数(还有其他分配函数)分配到空间,如果输入非法指针参数,会返回 cudaErrorInvalidDevicePointer 错误,如果重复释放一个空间,也会报错。
目前为止,套路基本和C语言一致。但是,设备内存的分配和释放非常影响性能,所以,尽量重复利用!
内存传输
下面介绍点C语言没有的,C语言的内存分配完成后就可以直接读写了,但是对于异构计算,这样是不行的,因为主机线程不能访问设备内存,设备线程也不能访问主机内存,这时候我们要传送数据了:1
cudaError_t cudaMemcpy(void *dst,const void * src,size_t count,enum cudaMemcpyKind kind)
这个函数我们前面也反复用到,注意这里的参数是指针,而不是指针的指针,第一个参数dst是目标地址,第二个参数src是原始地址,然后是拷贝的内存大小,最后是传输类型,传输类型包括以下几种:
- cudaMemcpyHostToHost
- cudaMemcpyHostToDevice
- cudaMemcpyDeviceToHost
- cudaMemcpyDeviceToDevice
四种方式,都写在字面上来,唯一有点问题的就是有个host 到host,不知道为啥存在,估计很多人跟我想法一样,可能后面有什么高级的用法。
这个例子也不用说了,前面随便找个有数据传输的都有这两步:从主机到设备,然后计算,最后从设备到主机。
代码省略,来张图: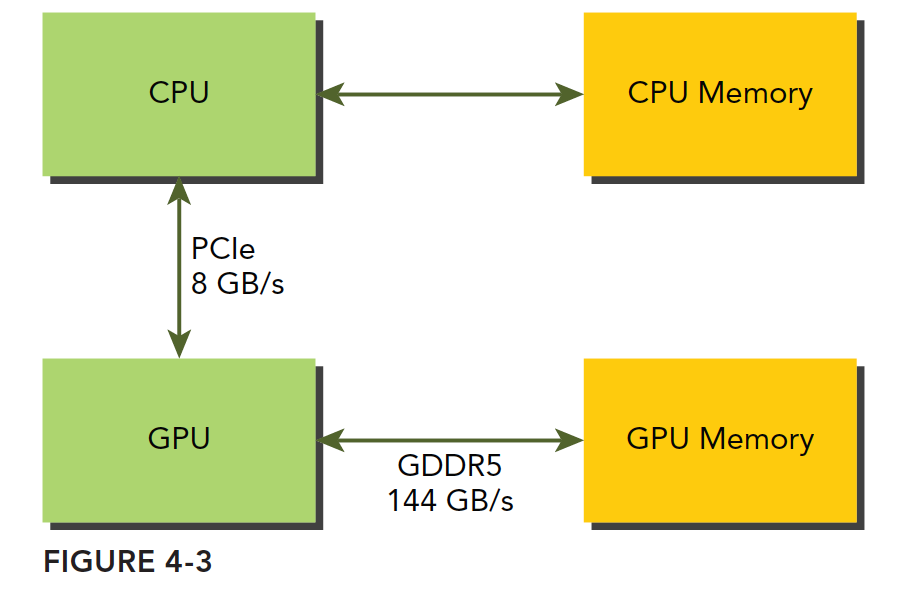
GPU的内存采用的DDR5制式,2011三星才做出来DDR4的主机内存,但是GPU却一直在使用DDR5,这个具体原因我也不清楚,有兴趣的同学自行去查询,但是我们要说的是GPU的内存理论峰值带宽非常高,对于Fermi C2050 有144GB/s,这个值估计现在的GPU应该都超过了,CPU和GPU之间通信要经过PCIe总线,总线的理论峰值要低很多——8GB/s左右,也就是说所,管理不当,算到半路需要从主机读数据,那效率瞬间全挂在PCIe上了。
CUDA编程需要大家减少主机和设备之间的内存传输。
固定内存
主机内存采用分页式管理,通俗的说法就是操作系统把物理内存分成一些“页”,然后给一个应用程序一大块内存,但是这一大块内存可能在一些不连续的页上,应用只能看到虚拟的内存地址,而操作系统可能随时更换物理地址的页(从原始地址复制到另一个地址)但是应用是不会差觉得,但是从主机传输到设备上的时候,如果此时发生了页面移动,对于传输操作来说是致命的,所以在数据传输之前,CUDA驱动会锁定页面,或者直接分配固定的主机内存,将主机源数据复制到固定内存上,然后从固定内存传输数据到设备上: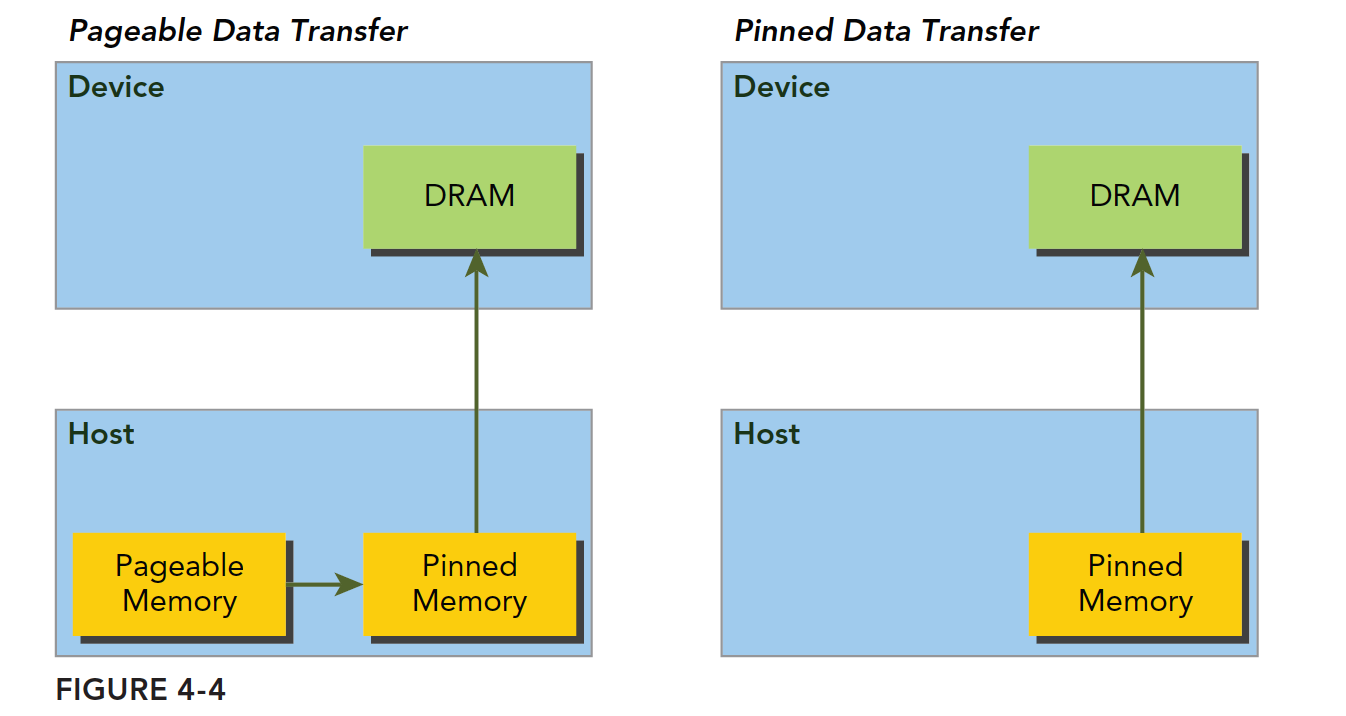
上图左边是正常分配内存,传输过程是:锁页-复制到固定内存-复制到设备
右边时分配时就是固定内存,直接传输到设备上。
下面函数用来分配固定内存:1
cudaError_t cudaMallocHost(void ** devPtr,size_t count)
分配count字节的固定内存,这些内存是页面锁定的,可以直接传输到设备的(翻译的原文写的是:设备可访问的,英文原文是:Since the pinned memory can be accessed directly by the device。应该是翻译问题)这样就是的传输带宽变得高很多。
固定的主机内存释放使用:1
cudaError_t cudaFreeHost(void *ptr)
我们可以测试一下固定内存和分页内存的传输效率,代码如下1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
void sumArrays(float * a,float * b,float * res,const int size)
{
for(int i=0;i<size;i+=4)
{
res[i]=a[i]+b[i];
res[i+1]=a[i+1]+b[i+1];
res[i+2]=a[i+2]+b[i+2];
res[i+3]=a[i+3]+b[i+3];
}
}
__global__ void sumArraysGPU(float*a,float*b,float*res)
{
int i=blockIdx.x*blockDim.x+threadIdx.x;
res[i]=a[i]+b[i];
}
int main(int argc,char **argv)
{
int dev = 0;
cudaSetDevice(dev);
int nElem=1<<14;
printf("Vector size:%d\n",nElem);
int nByte=sizeof(float)*nElem;
float *a_h=(float*)malloc(nByte);
float *b_h=(float*)malloc(nByte);
float *res_h=(float*)malloc(nByte);
float *res_from_gpu_h=(float*)malloc(nByte);
memset(res_h,0,nByte);
memset(res_from_gpu_h,0,nByte);
float *a_d,*b_d,*res_d;
// pine memory malloc
CHECK(cudaMallocHost((float**)&a_d,nByte));
CHECK(cudaMallocHost((float**)&b_d,nByte));
CHECK(cudaMallocHost((float**)&res_d,nByte));
initialData(a_h,nElem);
initialData(b_h,nElem);
CHECK(cudaMemcpy(a_d,a_h,nByte,cudaMemcpyHostToDevice));
CHECK(cudaMemcpy(b_d,b_h,nByte,cudaMemcpyHostToDevice));
dim3 block(1024);
dim3 grid(nElem/block.x);
sumArraysGPU<<<grid,block>>>(a_d,b_d,res_d);
printf("Execution configuration<<<%d,%d>>>\n",grid.x,block.x);
CHECK(cudaMemcpy(res_from_gpu_h,res_d,nByte,cudaMemcpyDeviceToHost));
sumArrays(a_h,b_h,res_h,nElem);
checkResult(res_h,res_from_gpu_h,nElem);
cudaFreeHost(a_d);
cudaFreeHost(b_d);
cudaFreeHost(res_d);
free(a_h);
free(b_h);
free(res_h);
free(res_from_gpu_h);
return 0;
}
注意这个核函数将会被本篇所有程序使用,今天的关键在于主机分配内存部分,所以核函数就选个最简单的。大家看看效率就好。
使用1
nvprof ./pine_memory
如果提示错误:1
Error: CUDA profiling error.
可以改用root权限执行,这时候又发现root没有nvprof程序,所以如图一样,用完整路径执行就好,或者添加到你的path里面。
结果如下: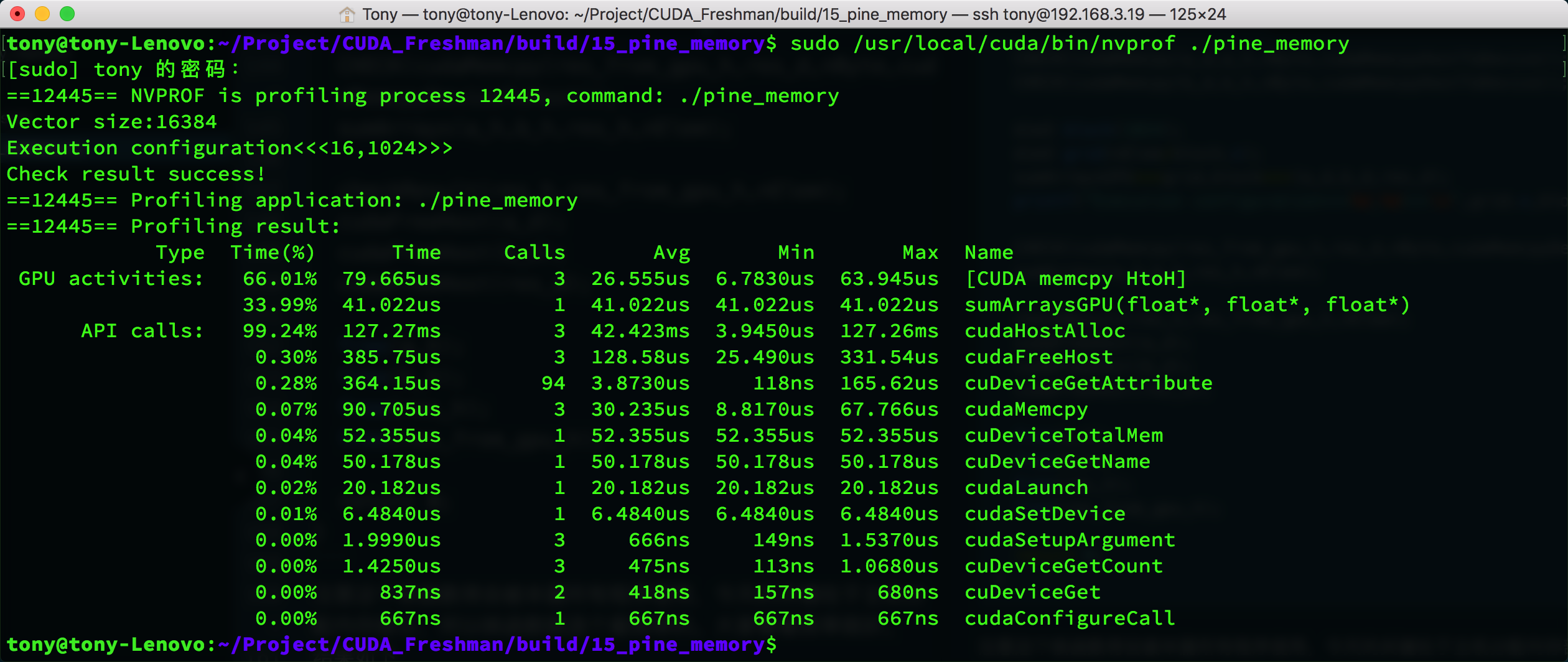
作为对比,我们改写了代码库中第三个里的参数,使用常规内存拷贝方法,得到的时间如下:
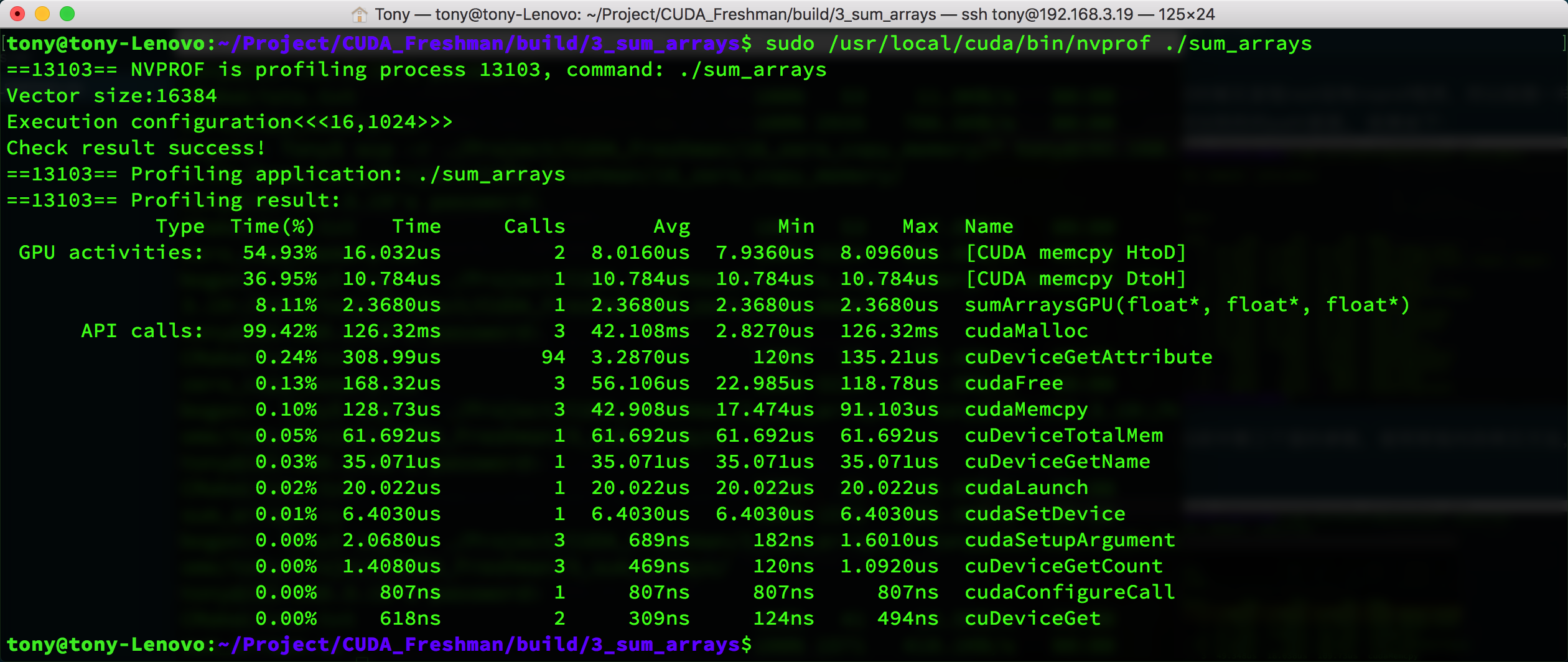
这个结果有点尴尬,固定内存的指标显示的是HtoH,也就是主机到主机的内存拷贝,而常规拷贝显示了HtoD。主机到设备但是看memcpy的速度能看出固定内存耗时确实少一些30:42。
同时也能看到cudaHostAlloc和cudaMalloc的时间接近,当数据增大的时候,这个就有区别了,cudaHostAlloc会慢很多。
结论:
固定内存的释放和分配成本比可分页内存要高很多,但是传输速度更快,所以对于大规模数据,固定内存效率更高。
尽量使用流来使内存传输和计算之间同时进行,第六章详细介绍这部分。
零拷贝内存
截止到目前,我们所接触到的内存知识的基础都是:主机直接不能访问设备内存,设备不能直接访问主机内存。对于早期设备,这是肯定的,但是后来,一个例外出现了——零拷贝内存。
GPU线程可以直接访问零拷贝内存,这部分内存在主机内存里面,CUDA核函数使用零拷贝内存有以下几种情况:
- 当设备内存不足的时候可以利用主机内存
- 避免主机和设备之间的显式内存传输
- 提高PCIe传输率
前面我们讲,注意线程之间的内存竞争,因为他们可以同时访问同一个内存地址,现在设备和主机可以同时访问同一个设备地址了,所以,我们要注意主机和设备的内存竞争——当使用零拷贝内存的时候。
零拷贝内存是固定内存,不可分页。可以通过以下函数创建零拷贝内存:1
cudaError_t cudaHostAlloc(void ** pHost,size_t count,unsigned int flags)
最后一个标志参数,可以选择以下值:
- cudaHostAllocDefalt
- cudaHostAllocPortable
- cudaHostAllocWriteCombined
- cudaHostAllocMapped
cudaHostAllocDefalt和cudaMallocHost函数一致,cudaHostAllocPortable函数返回能被所有CUDA上下文使用的固定内存,cudaHostAllocWriteCombined返回写结合内存,在某些设备上这种内存传输效率更高。cudaHostAllocMapped产生零拷贝内存。
注意,零拷贝内存虽然不需要显式的传递到设备上,但是设备还不能通过pHost直接访问对应的内存地址,设备需要访问主机上的零拷贝内存,需要先获得另一个地址,这个地址帮助设备访问到主机对应的内存,方法是:1
cudaError_t cudaHostGetDevicePointer(void ** pDevice,void * pHost,unsigned flags);
pDevice就是设备上访问主机零拷贝内存的指针了!
此处flag必须设置为0,具体内容后面有介绍。
零拷贝内存可以当做比设备主存储器更慢的一个设备。
频繁的读写,零拷贝内存效率极低,这个非常容易理解,因为每次都要经过PCIe,千军万马堵在独木桥上,速度肯定慢,要是再有人来来回回走,那就更要命了。我们下面进行一个小实验,数组加法,改编自前面的代码,然后我们看看效果:
主函数代码,核函数如上节代码:1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83int main(int argc,char **argv)
{
int dev = 0;
cudaSetDevice(dev);
int power=10;
if(argc>=2)
power=atoi(argv[1]);
int nElem=1<<power;
printf("Vector size:%d\n",nElem);
int nByte=sizeof(float)*nElem;
float *res_from_gpu_h=(float*)malloc(nByte);
float *res_h=(float*)malloc(nByte);
memset(res_h,0,nByte);
memset(res_from_gpu_h,0,nByte);
float *a_host,*b_host,*res_d;
double iStart,iElaps;
dim3 block(1024);
dim3 grid(nElem/block.x);
res_from_gpu_h=(float*)malloc(nByte);
float *a_dev,*b_dev;
CHECK(cudaHostAlloc((float**)&a_host,nByte,cudaHostAllocMapped));
CHECK(cudaHostAlloc((float**)&b_host,nByte,cudaHostAllocMapped));
CHECK(cudaMalloc((float**)&res_d,nByte));
initialData(a_host,nElem);
initialData(b_host,nElem);
//=============================================================//
iStart = cpuSecond();
CHECK(cudaHostGetDevicePointer((void**)&a_dev,(void*) a_host,0));
CHECK(cudaHostGetDevicePointer((void**)&b_dev,(void*) b_host,0));
sumArraysGPU<<<grid,block>>>(a_dev,b_dev,res_d);
CHECK(cudaMemcpy(res_from_gpu_h,res_d,nByte,cudaMemcpyDeviceToHost));
iElaps = cpuSecond() - iStart;
//=============================================================//
printf("zero copy memory elapsed %lf ms \n", iElaps);
printf("Execution configuration<<<%d,%d>>>\n",grid.x,block.x);
//-----------------------normal memory---------------------------
float *a_h_n=(float*)malloc(nByte);
float *b_h_n=(float*)malloc(nByte);
float *res_h_n=(float*)malloc(nByte);
float *res_from_gpu_h_n=(float*)malloc(nByte);
memset(res_h_n,0,nByte);
memset(res_from_gpu_h_n,0,nByte);
float *a_d_n,*b_d_n,*res_d_n;
CHECK(cudaMalloc((float**)&a_d_n,nByte));
CHECK(cudaMalloc((float**)&b_d_n,nByte));
CHECK(cudaMalloc((float**)&res_d_n,nByte));
initialData(a_h_n,nElem);
initialData(b_h_n,nElem);
//=============================================================//
iStart = cpuSecond();
CHECK(cudaMemcpy(a_d_n,a_h_n,nByte,cudaMemcpyHostToDevice));
CHECK(cudaMemcpy(b_d_n,b_h_n,nByte,cudaMemcpyHostToDevice));
sumArraysGPU<<<grid,block>>>(a_d_n,b_d_n,res_d_n);
CHECK(cudaMemcpy(res_from_gpu_h,res_d,nByte,cudaMemcpyDeviceToHost));
iElaps = cpuSecond() - iStart;
//=============================================================//
printf("device memory elapsed %lf ms \n", iElaps);
printf("Execution configuration<<<%d,%d>>>\n",grid.x,block.x);
//--------------------------------------------------------------------
sumArrays(a_host,b_host,res_h,nElem);
checkResult(res_h,res_from_gpu_h,nElem);
cudaFreeHost(a_host);
cudaFreeHost(b_host);
cudaFree(res_d);
free(res_h);
free(res_from_gpu_h);
cudaFree(a_d_n);
cudaFree(b_d_n);
cudaFree(res_d_n);
free(a_h_n);
free(b_h_n);
free(res_h_n);
free(res_from_gpu_h_n);
return 0;
}
结果: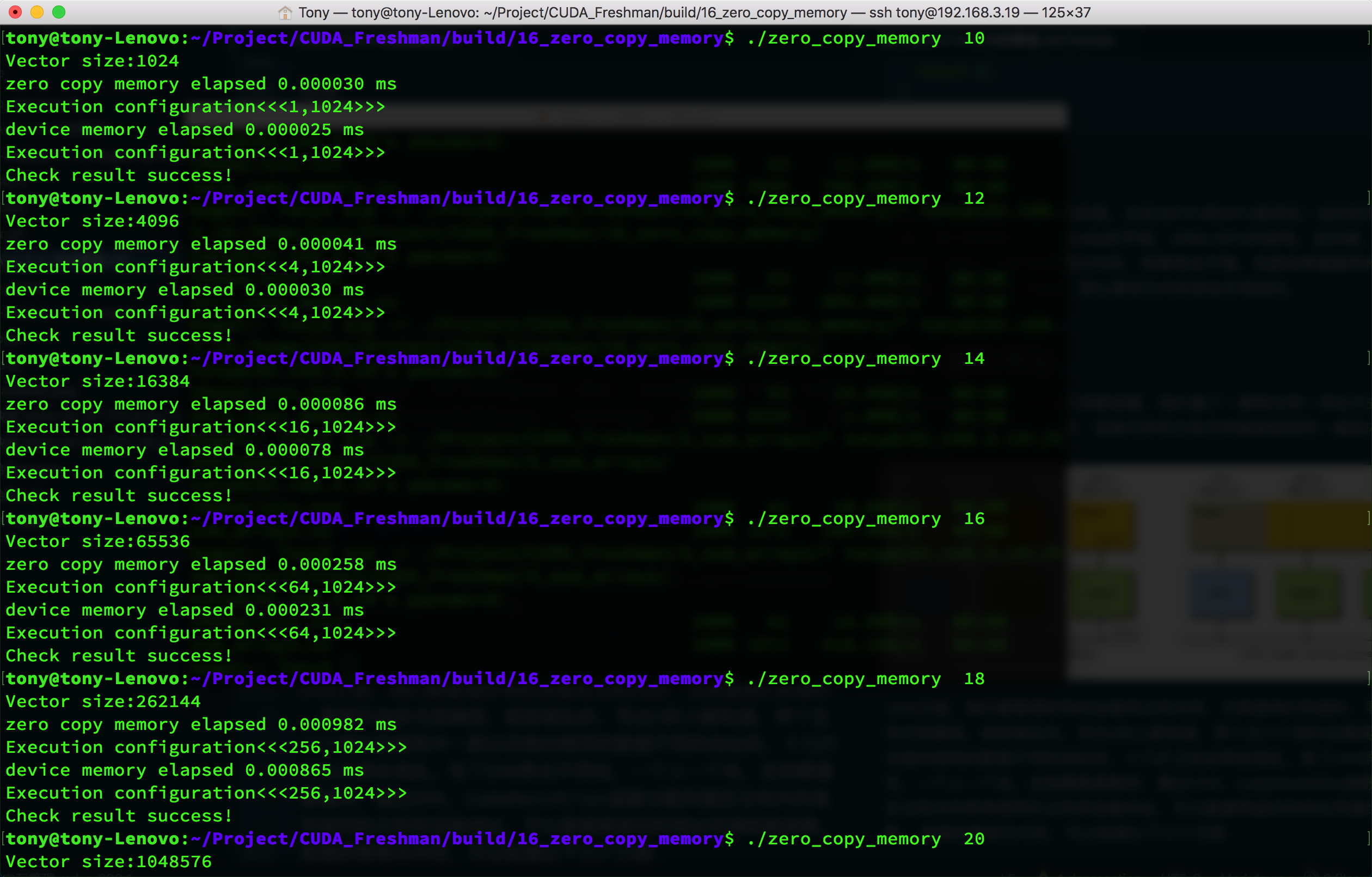
我们把结果写在一个表里面:
| 数据规模n( $2^n$ ) | 常规内存(us) | 零拷贝内存(us) |
|---|---|---|
| 10 | 2.5 | 3.0 |
| 12 | 3.0 | 4.1 |
| 14 | 7.8 | 8.6 |
| 16 | 23.1 | 25.8 |
| 18 | 86.5 | 98.2 |
| 20 | 290.9 | 310.5 |
这是通过观察运行时间得到的,当然也可以通过我们上面的nvprof得到内核执行时间:
| 数据规模n( $2^n$ ) | 常规内存(us) | 零拷贝内存(us) |
|---|---|---|
| 10 | 1.088 | 4.257 |
| 12 | 1.056 | 8.00 |
| 14 | 1,920 | 24.578 |
| 16 | 4.544 | 86.63 |
直接上数据,图太多,没办法贴了,但是这种比较方法有点问题,因为零拷贝内存在执行内核的时候相当于还执行了内存传输工作,所以我觉得应该把内存传输也加上,那样看速度就基本差不多了,但是如果常规内存完成传输后可以重复利用,那又是另一回事了。
但是零拷贝内存也有例外的时候,比如当CPU和GPU继承在一起的时候,你别不信,我手里就有一个,Nvidia的平板,ARM+GPU的架构,这时候,他们的物理内存公用的,这时候零拷贝内存,效果相当不错。但是如果离散架构,主机和设备之间通过PCIe连接,那么零拷贝内存将会非常耗时。
统一虚拟寻址
设备架构2.0以后,Nvida又有新创意,他们搞了一套称为同一寻址方式(UVA)的内存机制,这样,设备内存和主机内存被映射到同一虚拟内存地址中。如图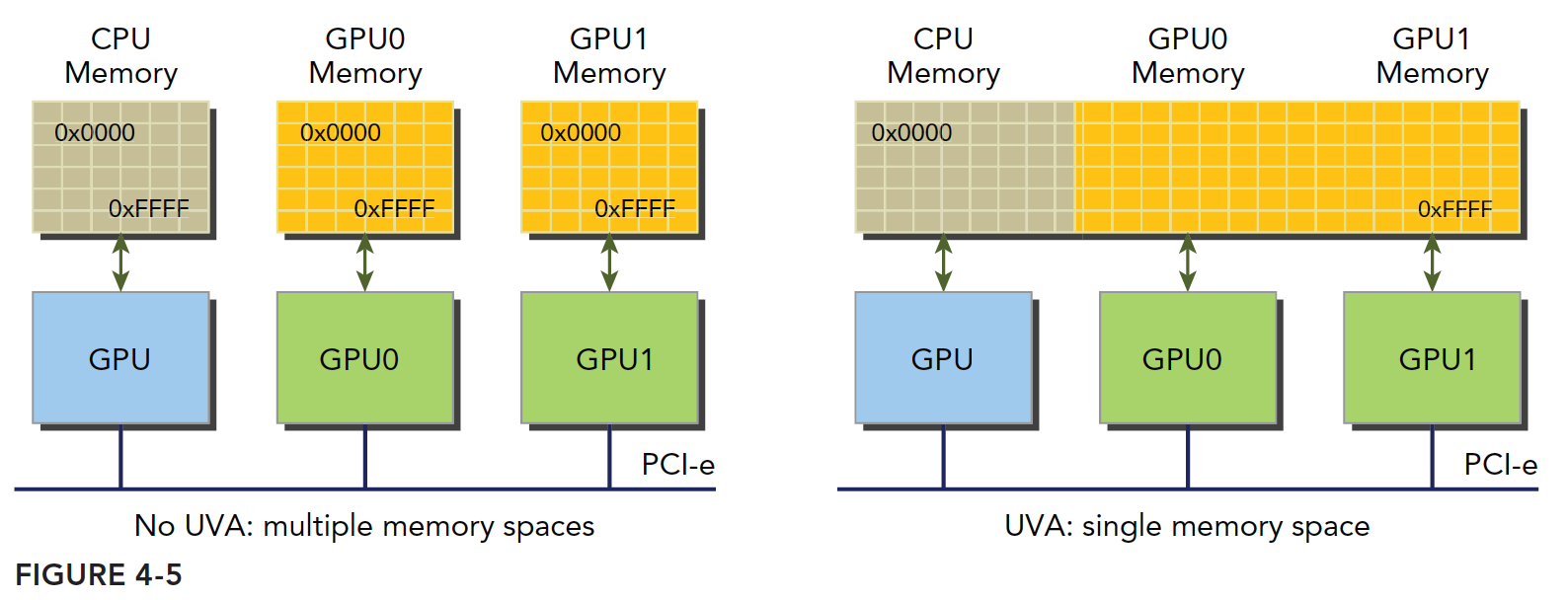
UVA之前,我们要管理所有的设备和主机内存,尤其是他们的指针,零拷贝内存尤其麻烦,很容易乱的,写过c的人都知道,弄个五六个指针在哪其中一部分还指向相同的数据不同的地址的,十几行之后必然会混乱。有了UVA再也不用怕,一个人一个名,走到哪里都能用,通过UVA,cudaHostAlloc函数分配的固定主机内存具有相同的主机和设备地址,可以直接将返回的地址传递给核函数。
前面的零拷贝内存,可以知道以下几个方面:
- 分配映射的固定主机内存
- 使用CUDA运行时函数获取映射到固定内存的设备指针
- 将设备指针传递给核函数
有了UVA,可以不用上面的那个获得设备上访问零拷贝内存的函数了:1
cudaError_t cudaHostGetDevicePointer(void ** pDevice,void * pHost,unsigned flags);
UVA来了以后,此函数基本失业了。
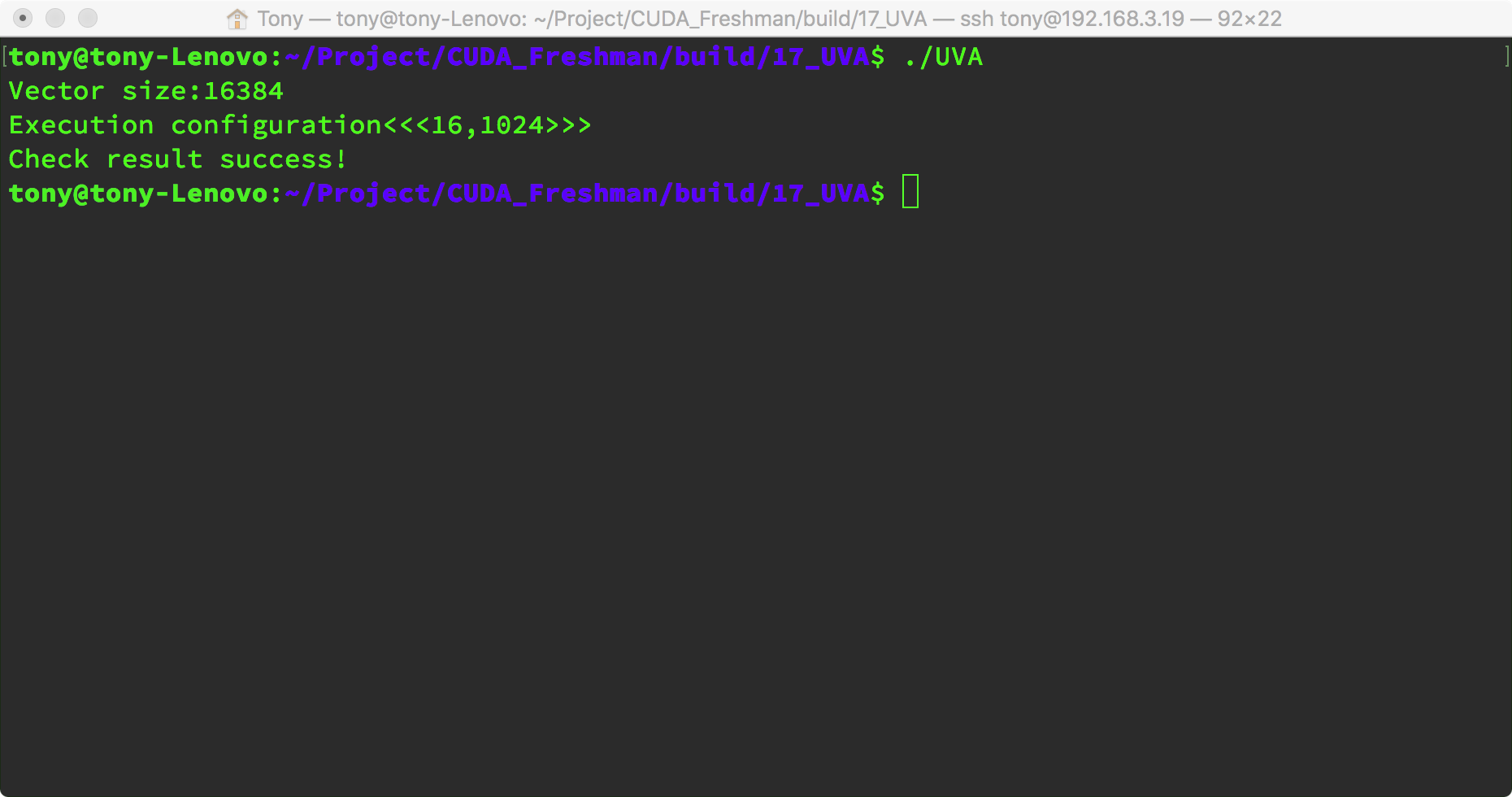
试验,代码:1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
float *a_host,*b_host,*res_d;
CHECK(cudaHostAlloc((float**)&a_host,nByte,cudaHostAllocMapped));
CHECK(cudaHostAlloc((float**)&b_host,nByte,cudaHostAllocMapped));
CHECK(cudaMalloc((float**)&res_d,nByte));
res_from_gpu_h=(float*)malloc(nByte);
initialData(a_host,nElem);
initialData(b_host,nElem);
dim3 block(1024);
dim3 grid(nElem/block.x);
sumArraysGPU<<<grid,block>>>(a_host,b_host,res_d);
}
UVA代码主要就是差个获取指针,UVA可以直接使用主机端的地址。
结果:
统一内存寻址
Nvidia的同志们还是不停的搞出新花样,CUDA6.0的时候又来了个统一内存寻址,注意不是同一虚拟寻址,提出的目的也是为了简化内存管理(我感觉是越简化越困难,因为套路多了)统一内存中创建一个托管内存池(CPU上有,GPU上也有),内存池中已分配的空间可以通过相同的指针直接被CPU和GPU访问,底层系统在统一的内存空间中自动的进行设备和主机间的传输。数据传输对应用是透明的,大大简化了代码。
就是搞个内存池,这部分内存用一个指针同时表示主机和设备内存地址,依赖于UVA但是是完全不同的技术。
统一内存寻址提供了一个“指针到数据”的编程模型,概念上类似于零拷贝,但是零拷贝内存的分配是在主机上完成的,而且需要互相传输,但是统一寻址不同。
托管内存是指底层系统自动分配的统一内存,未托管内存就是我们自己分配的内存,这时候对于核函数,可以传递给他两种类型的内存,已托管和未托管内存,可以同时传递。
托管内存可以是静态的,也可以是动态的,添加 managed 关键字修饰托管内存变量。静态声明的托管内存作用域是文件,这一点可以注意一下。
托管内存分配方式:1
cudaError_t cudaMallocManaged(void ** devPtr,size_t size,unsigned int flags=0)
这个函数和前面函数结构一致,注意函数名就好了,参数就不解释了,很明显了已经。
CUDA6.0中设备代码不能调用cudaMallocManaged,只能主机调用,所有托管内存必须在主机代码上动态声明,或者全局静态声明
。后面4.5 我们会详细的研究统一内存寻址。
总结
本文介绍了CUDA内存管理中几种技术,注意区别他们的相同点和不同点。
代码库:https://github.com/tony-tan